

 行业动态
行业动态

在飞行试验中,为了考核飞机的性能与指标,需要在飞机上构建庞大的试飞测试系统,去采集、记录飞机的各项性能参数。飞机舵面偏度是试飞测试系统所需要采集的重要参数,它能够反映飞机的舵面变化,对于考核飞机的飞行性能有着重要的作用。在传统的飞机舵面偏度测量中,一般选用电阻式的线位移传感器或角位移传感器。该型传感器量程大,但精度差(毫米级),已经无法满足当前舵面偏度测量精度的需求。本文将采用RVDT传感器来实现对飞机舵面偏度的测量,将详细论述RVDT传感器的测试原理和信号采集以及数据校准等。
RVDT传感器的测量原理
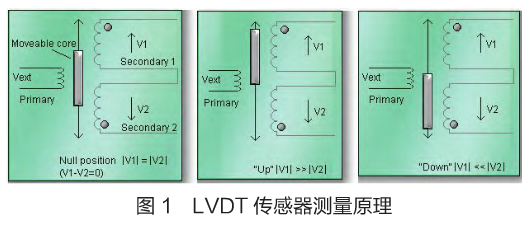
RVDT传感器属于电感式位移传感器,实际上是铁芯可动变压器,由一个初级线圈,两个次级线圈,铁芯,线圈骨架,外壳等部分组成。当铁芯处于线圈骨架的中间位置时,两个次级线圈输出的电动势V1和V2相等,输出电压为零;当铁芯偏离中间位置时,两个次级线圈的电动势V1和V2不相等,输出一定的电压,如图2所示。因此RVDT传感器,具有如下优点:(1)环境适应性强,坚固耐用;(2)零位稳定,精度高;(3)抗冲击能力强,耐振极限高。RVDT传感器的初级线圈需要固定频率的正弦交流激励,激励的模型如式1所示,激励频率f一般选择铁芯移动带宽的10倍以上:
()(2)
excexc
VtASinf
π
=∗∗∗
(1)那么RVDT传感器的电压V0就等于两次级线圈的电压差,如式2所示:
sec1sec2extext
0rmsrmsrmsrms
V=V-VP*V*S+V*O
≅
(2)式2中,P为RVDT传感器的铁芯位置,Vrmsext为初级线圈的激励电压的有效值,S为RVDT传感器的灵敏度,O为两个次级线圈的差异系数。假设RVDT传感器两个次级线圈完全相同,那么RVDT传感器的电压输出将简化为式3所示,即铁芯位置P与传感器输出的电压V0存在一定的线性关系。
ext
0rms
VP*V*S
≅
(3)
RVDT传感器的信号采集
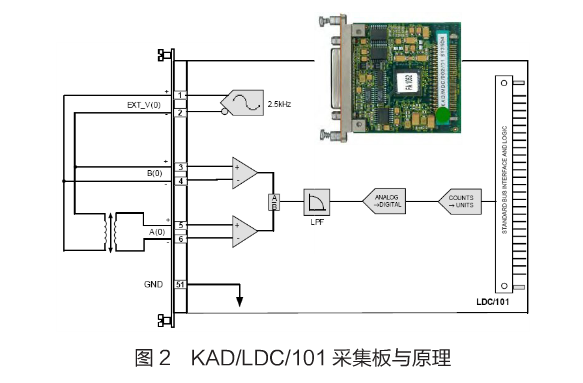
KAD/LDC/101采集板是KAM500采集器中专门用来处理RVDT传感器信号的板卡,如图2所示。KAD/LDC/101采集板提供3V rms @2.5KHz交流激励源,RVDT传感器在感测到舵面偏度的变化后,便输出包含角度信息的交流信号,将该交流信号和激励源的交流信号进行必要的运算处理,便可以得到飞机舵面偏度。KAD/LDC/101板卡原理如2所示,使用KAD/LDC/101采集板可以避免使用单独的信号激励与调节设备,简化了测试系统,使其工作
RVDT传感器的数据校准
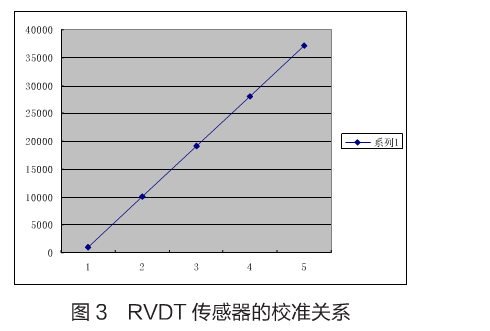
RVDT传感器安装在飞机舵面的转动机构上,通过RVDT采集板卡,试飞测试系统可以采集到包含舵面转动角度的数字信号,因此必须建立该数字信号与舵面偏度的真实关系,试飞测试系统才可以获得飞机舵面偏度物理量值。通过在飞机舵面安装角规校准仪器,可以真实得到舵面偏度,并根据RVDT相应的数字信号,确立RVDT传感器的校准,
并可以得到如图3所示的舵面偏度与RVDT传感器数字信号的校准关系。通过校准,RVDT传感器便可以真实采集到飞机舵面偏度的量值。
结语
针对飞行试验中飞机舵面偏度的测量方面,本文选用了电感式位移传感器RVDT进行高精度测量,详细论述了RVDT传感器的测试原理,并简要介绍了RVDT传感器的信号采集与处理,最后通过传感器校准,确立了RVDT传感器数字信号与飞机舵面偏度的关系。经过试飞验证,该RVDT传感器工作可靠,精度满足试飞要求。

 版权所有2017
版权所有2017